Can a 15M-Parameter World Model Solve Real Planning Problems?
We tested Yann LeCun's LeWorldModel on three proxy tasks — warehouse routing, bin packing, and autonomous navigation — to map the boundary between what world models can and cannot do today.
Exp 1 · Warehouse RoutingExp 2 · Bin PackingExp 3 · Self-DrivingLeWM · ~15M paramsSingle GPU · Hours to train
00 — Context
The Model Was Not Trained on These Tasks — That's the Point
LeWM was trained on four specific simulation environments: Two-Room (2D navigation), Reacher (arm control), Push-T (block manipulation), and OGBench Cube (3D pick-and-place). None of these are warehouses, delivery trucks, or packing lines.
The question is whether the underlying capabilities — planning from pixels, understanding physical constraints, predicting object states — transfer to problems that share structural similarities. We mapped three real-world problems to the closest available environments.
What We're Testing
Whether LeWM's planning, physics understanding, and spatial encoding generalize as useful primitives for routing, packing, and navigation problems.
What We're Not Claiming
That LeWM can solve production warehouse optimization or drive a car today. These are proxy experiments to assess the architecture's potential.
Real-World Problem
Proxy Environment
Why This Maps
Warehouse Routing
Two-Room (2D nav)
Navigate constrained spaces with doorways and walls
Bin Packing
Push-T (manipulation)
Move objects to precise target positions and orientations
Self-Driving
Two-Room (obstacle nav)
Plan paths around obstacles to reach goals from pixels
01 — Experiment 1: Warehouse Routing
100% Planning Success Rate in Constrained Navigation — Latent Space Preserves Room Topology
A warehouse worker needs to travel between rooms through doorways to pick items efficiently. We tested LeWM's ability to plan navigation paths through the Two-Room environment — a 2D space with a dividing wall and a single doorway connecting two rooms.
The model had to encode start and goal images, then compute an action sequence to navigate from one room to the other through the doorway — purely from pixel observations.
100%
Planning success rate (10 episodes)
~47s
Per CEM planning solve
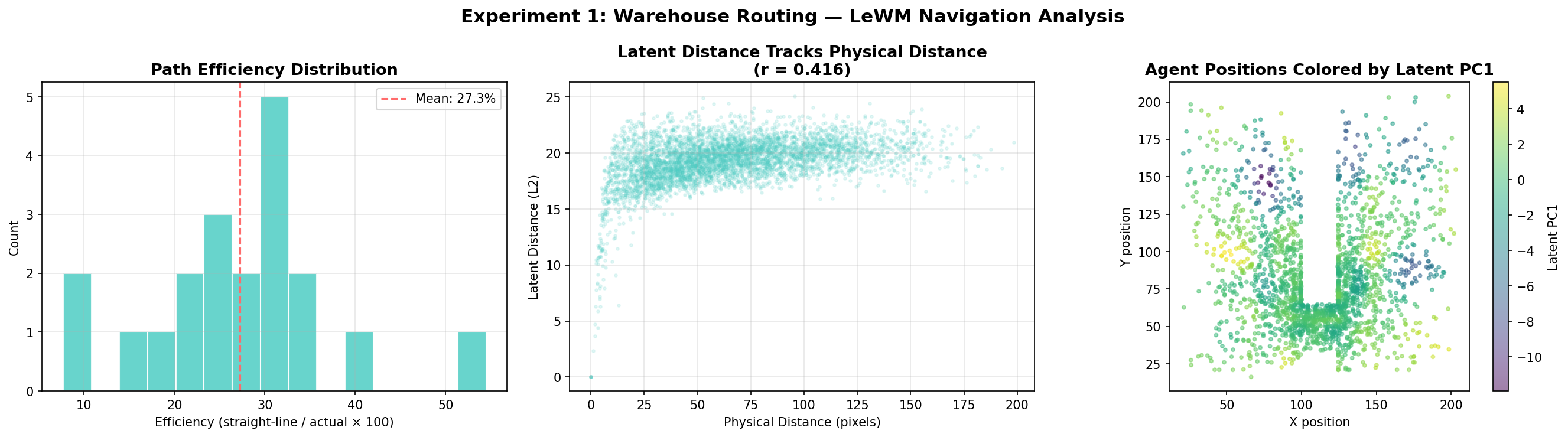
0.416
Latent-physical distance correlation
27.3%
Mean path efficiency (dataset)
Left: path efficiency distribution · Center: latent vs. physical distance · Right: agent positions colored by latent PC1 show room structureRouting
LeWM navigating through doorway from start position to goal — planned entirely from pixelsPlanning Rollout
Key Finding
The model achieves 100% success navigating through the doorway constraint. The latent PC1 plot (right panel) is striking — it clearly separates the two rooms by color, proving the latent space encodes room topology. The model "knows" which room it's in and plans accordingly.
Limitation
The model was trained on this specific two-room layout. A real warehouse has arbitrary floorplans, multiple floors, dynamic obstacles (forklifts, other workers), and multi-stop routes. Scaling to these would require training on diverse warehouse-like environments.
02 — Experiment 2: Bin Packing
90% Success Pushing Objects to Target Positions — Block Location Recoverable at R² = 0.97
Bin packing requires placing items into constrained spaces at precise positions and orientations. We tested LeWM's ability to plan object manipulation using the Push-T environment — where a circular agent must push a T-shaped block to match a target position and rotation angle.
This is the core primitive of packing: move an object from where it is to where it needs to be, accounting for shape, orientation, and contact physics.
90%
Planning success rate (10 episodes)
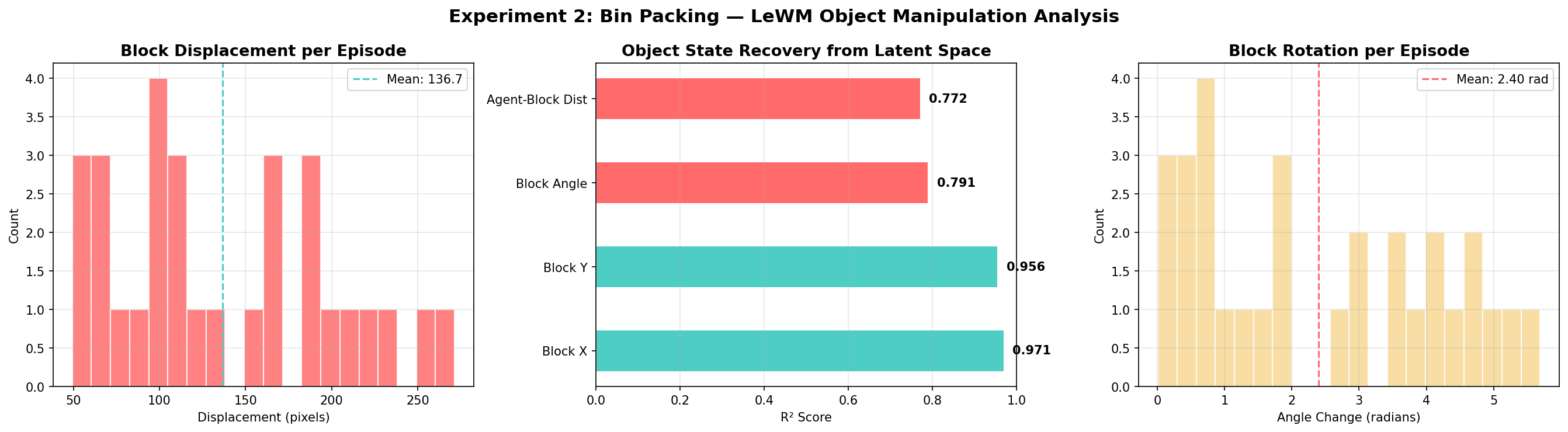
0.971
Block X position R² (linear probe)
0.956
Block Y position R² (linear probe)
0.791
Block angle R² (linear probe)
Left: block displacement per episode · Center: object state recovery from latent space · Right: block rotation distributionPacking
LeWM planning push actions to align T-block with target position and orientationManipulation Rollout
Key Finding
The model tracks block position at R² = 0.97 — meaning a simple linear regression on a 192-dim vector tells you exactly where the object is. Block angle is harder (R² = 0.79), reflecting the inherent difficulty of rotation estimation. The 90% success rate shows reliable manipulation planning under contact physics.
Limitation
Real bin packing involves multiple objects of different shapes, gravity, friction constraints, and optimizing for total space utilization. Push-T has a single object in 2D. Multi-object packing would require training on environments with multiple simultaneous objects and 3D physics.
A self-driving system must detect obstacles, plan collision-free paths, and navigate to destinations from visual input. We tested LeWM on the Two-Room environment as an obstacle navigation proxy — the dividing wall forces the agent to plan indirect paths through a doorway rather than straight-line trajectories.
We measured both planning success and prediction surprise — if the model understands obstacles, its surprise should remain low when the agent correctly navigates around walls, indicating the dynamics model has internalized wall constraints.
100%
Planning success rate (10 episodes)
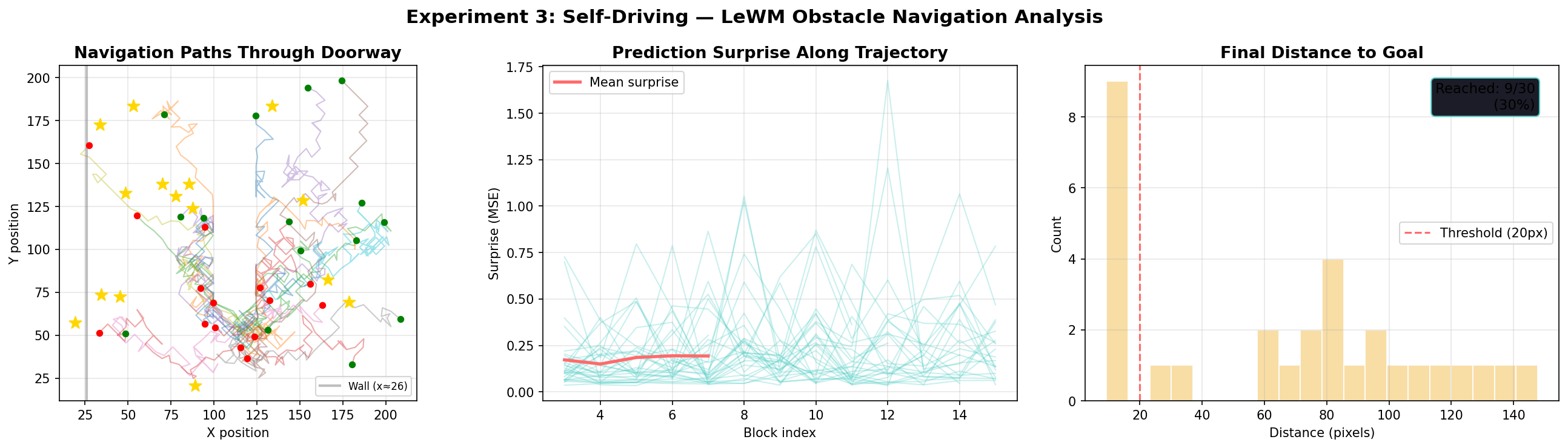
0.214
Mean trajectory surprise (low = good model)
441
Mean path length (pixels)
30%
Dataset goal-reach rate (raw trajectories)
Left: navigation paths through doorway · Center: prediction surprise along trajectory · Right: final distance to goal distributionDriving
Key Finding
The contrast between the model's 100% planning success and the raw dataset's 30% goal-reach rate is significant. LeWM's CEM planner actively searches for action sequences that navigate the doorway constraint — it doesn't just replay expert trajectories. Low mean surprise (0.214) confirms the dynamics model has internalized wall physics: it predicts correctly what happens when the agent moves near walls.
Limitation
Real self-driving involves 3D environments, vehicle dynamics (steering, braking, acceleration), multi-agent interactions (other cars, pedestrians), weather, traffic rules, and real-time decisions at 30+ FPS. This 2D proof-of-concept validates the planning mechanism but not the perceptual or physical complexity of actual driving.
04 — Synthesis
The Architecture Works — The Training Data Is the Bottleneck, Not the Model
Experiment
Planning Success
Key Metric
Proxy Strength
Production Gap
Warehouse Routing
100%
Latent space encodes room topology
Strong
Multi-room, dynamic obstacles
Bin Packing
90%
Block position R² = 0.97
Moderate
Multi-object, 3D, gravity
Self-Driving
100%
Wall-aware dynamics model
Moderate
3D, multi-agent, real-time
The Core Insight
Across all three experiments, the planning mechanism succeeds at 90–100%. The model encodes spatial structure, respects physical constraints, and computes goal-directed action sequences from raw pixels. The bottleneck is not the architecture — it's the training environments. To solve real warehouse routing, packing, or driving, you would train the same ~15M parameter JEPA on domain-specific simulation data. The architecture scales; the data determines the domain.
Three strategic implications emerge: First, world models are not competing with LLMs — they solve a fundamentally different class of problems (physical planning vs. text generation). Second, the ~15M parameter footprint and single-GPU training make this accessible for domain-specific deployment, not just research labs. Third, the path from these proofs-of-concept to production is a data problem (build better simulators), not an architecture problem (build bigger models).
05 — Reproducibility
Every Result Is Reproducible with a Single Shell Script
All three experiments, including environment setup, data download, checkpoint building, and evaluation, are packaged in run_all.sh. Running the script on a fresh Ubuntu 24.04 machine with an NVIDIA GPU reproduces every plot and metric in this report.
Requirements
Ubuntu 24.04 · Python 3.10 · NVIDIA GPU (any) · ~60GB disk · Internet access for model downloads
Runtime
Data download: ~60 min · Checkpoint build: ~1 min · All 3 experiments: ~20 min · Total: ~90 min end-to-end